|

Abbildung 1:

Abbildung 2:

Abbildung 3:

Abbildung 4:
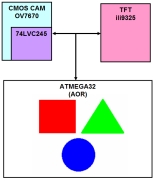
Abbildung 5: |
Projekt "AOR - Automatic Object Recognition"
Mittels
einer CMOS Kamera können Objekte automatisch erkannt und verfolgt werden.
Basis für
dieses Projekt ist, neben der Kamera mit OV7670 Chip, ein ATMEGA32 und
ein ili9325 TFT Display.
Die Komponenten sind auf einer Platine fertig bestückt im Handel erhältlich
Das Projekt teilt sich auf folgenden Phasen
auf:
Phase 1:
Erweiterung des vorhandenen Softwareumfangs um Funktionen zur
Pixelverarbeitung und Objekterkennung.
Phase 2:
Prototyping mit Einzelbildern und Validierung über TFT.
Phase 3:
Umsetzung des entwickelten Umfangs auf bewegte Bilder und Anzeige der
Objektverfolgung über TFT.
Unter
Abbildung 5 gibt es eine Dokumentation
µC-Quellcode
Pixelverarbeitung:
|
|
|
|
|
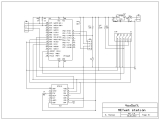
Abbildung 1:
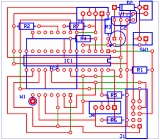
Abbildung 2:
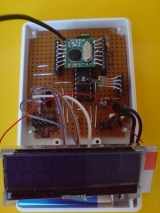
Abbildung 3:
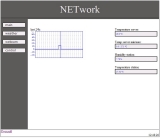
Abbildung 4:

Abbildung 5: |
Projekt "NETwet - Funk-Wetterstation mit Internetübertragung"
Über einen
Internet-Browser lässt sich auf Temperatur/Feuchtedaten zugreifen.
Basis für
dieses Projekt ist ein eigenentwickelter Webserver mit einem ATMEGA32 und
einem ENC28J60 Baustein.
Die Sensordaten der Temperatur und Feuchte werden per Funk an den Webserver
übermittelt, somit ist die Erfassung der Daten flexibel und
mobil.
Die Umweltdaten können über ein Display auch direkt an dem Funksender ("Station")
angezeigt werden.
Das Projekt teilt sich auf folgenden Phasen
auf:
Phase 1:
Aufbau des Funksenders inklusive Sensor/Messerfassung in einem eigenen Gehäuse
(Betrieb über 9V Block).
Phase 2:
Erweiterung der Basisfunktionen des Webservers um den Empfang der Sensordaten
über Funk.
Phase 3:
Umsetzung einer Informationsdarstellung der Sensordaten für den WEB-Browser.
Unter
Abbildung 5 gibt es eine Dokumentation
µC-Quellcode
NETwet base:
|
|
|
|
|
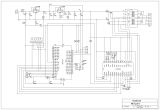
Abbildung 1:
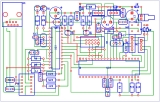
Abbildung 2:

Abbildung 3:

Abbildung 4:

Abbildung 5: |
Projekt "NETwork - Webserver mit Kamera und Sensoren"
Über einen
Internet-Browser lässt sich auf eine Kamera zugreifen.
Basis für dieses Projekt ist ein eigenentwickelter Webserver mit einem
ATMEGA32 und einem ENC28J60 Baustein. Die Kamera kommuniziert direkt mit dem
RISC und die Bilder werden über das Internet an den aufrufenden Browser
gesendet. Zusätzlich werden Sensordaten über den Browser angezeigt.
Das Projekt teilt sich auf folgenden Phasen auf:
Phase 1: Konzeption und Aufbau des Webservers mit Schnittstelle für ein Midas
I²C LCD Display. Erweiterung der Basisfunktionen um einen Temperatursensor und
eine MCA-25 Kamera.
Phase 2: Umsetzung einer Steueroberfläche für die Anzeige des Kamerabildes und
der Sensordaten über einen WEB-Browser.
Unter Abbildung 5 gibt es eine Dokumentation
µC-Quellcode
NETwork:
|
|
|
|
|

Abbildung 1:

Abbildung 2:

Abbildung 3:
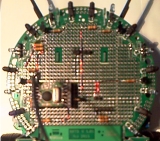
Abbildung 4:

Abbildung 5: |
Projekt "NETbee - Steuerung eines Roboter über WEB"
Über einen
Internet-Browser lässt sich ein fahrender Roboter fernsteuern.
Basis für
dieses Projekt ist ein RISC von Microchip, welcher als WEB-Server für die TCP-Kommunikation
und zum
übertragen der Befehle für den Roboter dient. Die Übertragungen der Signale vom WEB-Server zum
Roboter erfolgen über Funk. Der WEB-Server und der Funksender, sowie der Funkempfänger
mit dem Roboter, kommunizieren mittels SPI und UART.
Der Roboter
ist ein Kaufteil, die Kamera ist eine CMOS Mini Cam, welche über
einen DC/DC Wandler mit der Bordversorgung versorgt wird. Der Funksender
wird mit einem Atmel Evaluationboard und über ein ATA-Kabel angeschlossenes
Funkmodul realisiert. Der Funkempfänger wird direkt auf dem Roboter platziert.
Das Projekt teilt sich auf folgenden Phasen
auf:
Phase 1:
Aufbau des fahrenden Roboters und Umsetzung der notwendigen Implementierungen
einer Fernsteuerung. Erweiterung der Basisfunktionen um eine
Hinderniserkennung und ein LCD Display TC1602E, welches über ein I²C Modul
angesteuert wird.
Phase 2:
Umsetzung einer Steueroberfläche für die Steuerung über einen WEB-Browser. Die
Steuerbefehle für die einzelnen Fahrfunktionen werden über Button im WEB-Browser
ausgewählt und an
den WEB-Server übermittelt. Die Steuerbefehle werden als einzelne
ASCII-Zeichen über die UART-Schnittstelle des WEB-Servers an den Funksender
übertragen. Im Funksender wird aus den ASCII-Zeichen die Steuerbefehle und die
Check-Summe generiert.
Phase 3:
Verbinden der Komponenten Roboterfernsteuerung und WEB-Server über Funkmodule. Die
Sende- und Empfangsmodule RFM12 übermitteln die im Browser
eingegebenen Daten an den Roboter und vice versa. Mittels UART werden die Daten
vom WEB-Server (Typ PIC18F67J60) über einen ATtiny2313 und dann per SPI an das
Sendemodul übergeben. Das Empfangsmodul überträgt die Daten wiederum per SPI
direkt an die Robotersteuerung.
Unter
Abbildung 5 gibt es eine Dokumentation
µC-Quellcode
NETbee:
µC-Quellcode
NETbee base(Funksendeempfänger):
|
|
|
|
|

Abbildung 1:

Abbildung 2:

Abbildung 3:
Abbildung 4:

Abbildung 5:

Abbildung 6:
|
Projekt "NETcopter - Steuerung eines RC Helis über WEB"
Über einen
Internet-Browser lässt sich ein Modellhubschrauber fernsteuern.
Basis für
dieses Projekt ist ein RISC von Microchip, welcher als WEB-Server für die TCP-Kommunikation
und zum
übertragen der Befehle für den Hubschrauber dient. Der Hubschrauber wird über
Infrarot ferngesteuert, der IR-Sender ist mit einem ATtiny2313 realisiert und
eine Übertragung der Signale vom WEB-Server zur Fernsteuerung erfolgen über Funk. Der WEB-Server und der Funksender, sowie der Funkempfänger und die
IR-Fernsteuerung kommunizieren mittels SPI und UART.
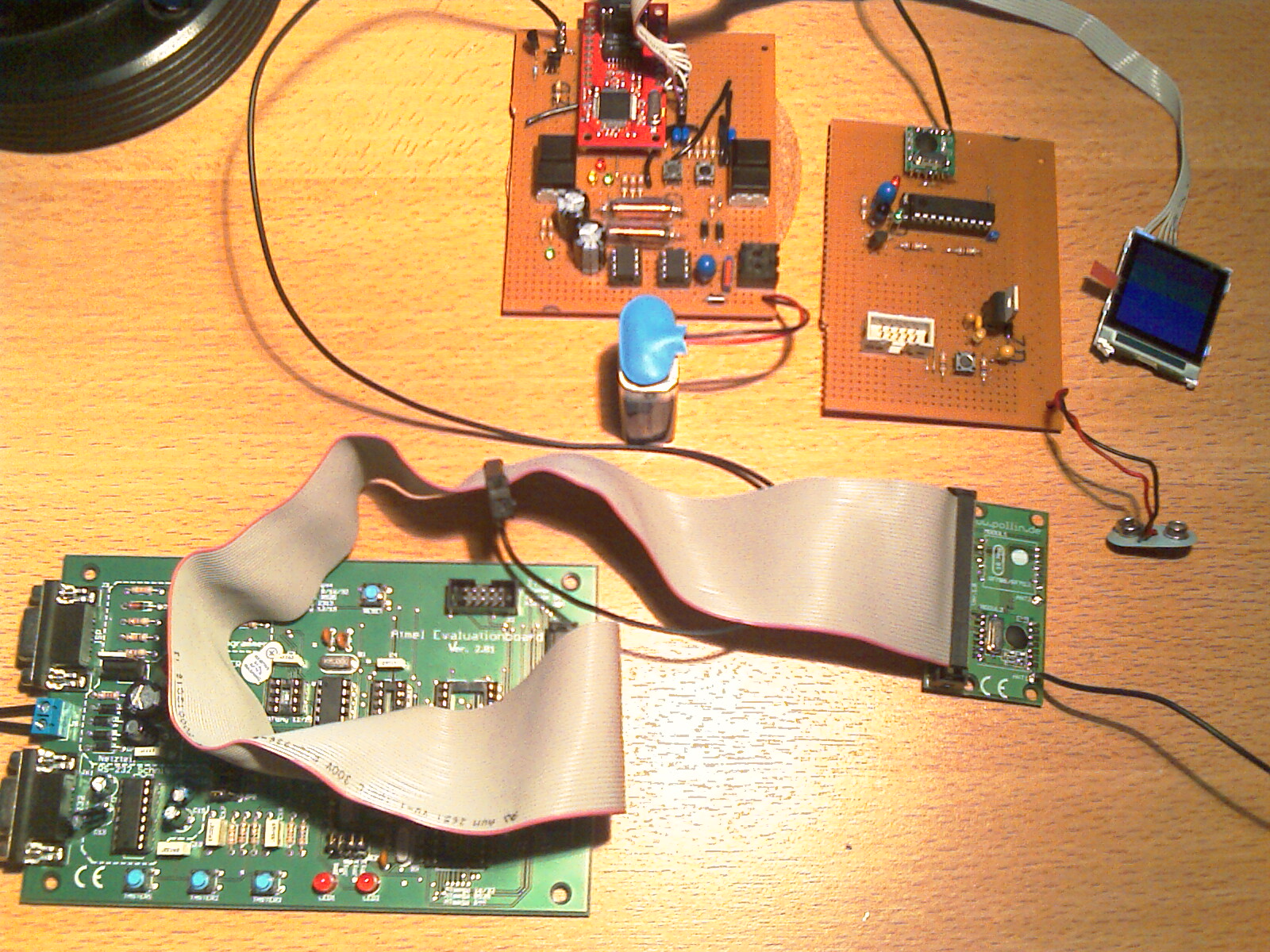
Abbildung 1
bis 3 zeigen einige verwendete Komponenten des Projektes. Der RC-Hubschrauber
ist ein Graupner Nano Star, die Kamera ist eine CMOS Mini Cam, welche über
einen DC/DC Wandler mit der Helikopterversorgung versorgt wird. Der Funksender
wird mit einem Atmel Evaluationboard und über ein ATA-Kabel angeschlossenes
Funkmodul realisiert. Der Funkempfänger und Infrarotsender sind auf einer
separaten Platine aufgebaut.
Das Projekt teilt sich auf folgenden Phasen
auf:
Phase 1:
Emulierung der Infrarotsteuerung des Helikopters mit einem eigenen Sendemodul
und Rekonstruktion des Infrarotprotokolls zur Fremdsteuerung. Wie in Abbildung 4
zu sehen, wurde das Datenprotokoll mittels eines PDA IR-Fernbedienungsprogramm
aufgenommen und anschließend in C und dem ATtiny2313 umgesetzt.
Graupner
Nano Star IR code:
|
data frame |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
32 |
33 |
34 |
|
header |
up/down |
left/right |
forward/backward |
trim: left/right |
Channel A/B/C |
checksum |
Stop |
|
|
value |
1/0 |
value |
1/0 |
value |
3F/0 |
value |
4/2/0 |
|
|
bit |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
32 |
|
example |
1 |
1 |
1 |
1 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
1 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
|
checksum |
15 |
3 |
15 |
8 |
1 |
7 |
4 |
5 |
|
|
calculation |
modulo16(15+3+15+8+1+7+4) = 5 |
|
Phase 2:
Umsetzung einer Steueroberfläche für die Steuerung über einen WEB-Browser. Die
Steuerbefehle für die einzelnen Helikopterfunktionen werden über Button im WEB-Browser
ausgewählt und an
den WEB-Server übermittelt. Die Steuerbefehle werden als einzelne
ASCII-Zeichen über die UART-Schnittstelle des WEB-Servers an den Funksender
übertragen. Im Funksender wird aus den ASCII-Zeichen der IR-Code und die
Check-Summe generiert.
Phase 3:
Verbinden der Komponenten IR-Fernsteuerung und WEB-Server über Funkmodule. Die
Sende- und Empfangsmodule RFM01 und RFM02 übermitteln die im Browser
eingegebenen Daten an die IR-Steuereinheit. Mittels UART werden die Daten
vom WEB-Server (Typ PIC18F67J60) über einen ATtiny2313 per SPI an das Sendemodul übergeben. Das
Empfangsmodul überträgt die Daten wiederum per SPI an einen ATtiny2313, welcher die
Steuerdaten über Infrarot an den Helikopter sendet.
Phase 4:
Implementierung aller Teilphasen zu einem Gesamtprojekt.
Unter
Abbildung 6 gibt es eine Dokumentation
µC-Quellcode
Funkempfänger und IR-Sender:
µC-Quellcode
Funksender:
|
|
|
|
|
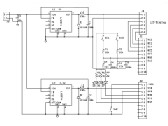
Abbildung 1:
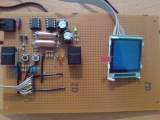
Abbildung 2:
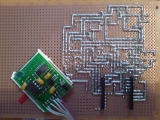
Abbildung 3:

Abbildung 4:

Abbildung 5:

Abbildung 6:
|
Projekt "NETraction - Steuerung für Mikrocontroller über WEB"
Über einen
Internet-Browser lassen sich Ports eines
Mikrocontrollers ferngesteuert ansteuern und auswerten.
Basis für
dieses Projekt ist ein RISC von Microchip über den die TCP-Kommunikation zum
Schalten und Einlesen der Ports ermöglicht wurde. Auch Text kann über das Netz
an ein Farbdisplay übertragen werden oder zeigt die aktuellen Verbindungsdaten an.
Abbildung 1
bis 3 zeigen den Schaltplan und die Platine des Versorgungs- und Schaltmoduls,
über zwei Steckleisten wird die Platine mit dem µC verbunden.
Die
projektspezifischen Softwareteile bestanden in der Integrierung des
LCD-Displays, der Tasterabfragen und der dafür notwendigen
Portkonfigurierungen. Die Erstellung der Software erfolgte, wie in Abbildung 4
zu sehen, mit der MPLAB IDE.
Die
applikationsspezifischen Anpassungen wurden in der SW-Struktur des
Elektor-Projektes "Netzer" vorgenommen. Die Abwandlung der im EEProm
gespeicherten HTML-Seiten des WEB-Servers und die Möglichkeit von Textübertragungen bedingte
einige Restrukturierungen des Quellcodes im Bereich der HTTP-Datentenübermittlung.
Unter
Abbildung 6 gibt es eine Dokumentation.
µC-Quellcode:
|
|
|

Abbildung 1:

Abbildung 2:

Abbildung 3:

Abbildung 4:
|
Projekt "Sprachsteuerung für Mikrocontroller"
In diesem
Projekt wurde eine Verbindung zwischen einem Mikrocontroller und einer
Spracherkennung geschaffen. Dabei können Sprachkommandos über eine
serielle Schnittstelle eines Notebooks an einen Atmega128 gesendet werden,
welcher dann über GPIOs LEDs an- und ausschaltet. Gleichzeitig werden
die am µController ankommenden Befehle auf einem Display von Nokia ausgegeben.
Ein mit
Quarz und Atmega128 ausgestattetes Miniboard wurde als erstes mittels eines
HDD-Kabels über einen Zwischenadapter
mit dem Steckbrett verbunden um alle benötigten Ports flexibel zur Verfügung
zu haben. Zusätzlich wurden an einigen
Ports Taster fest verdrahtet. Wie in Abbildung 1 zu sehen, ein nicht
unerheblicher Lötaufwand bei 60 Controller-Pins.
Das
Farbdisplay ist ein Handydisplay von Nokia und ist mit knapp 40,- nicht
ganz billig. Es kann mit 5V versorgt werden und ist mit nur vier Port-Leitungen
ansteuerbar. Nach jedem Reset muss das Display vor der Benutzung mit einer
bestimmten Sequenz über die Ansteuerleitungen initialisiert werden. Mit Hilfe
des Datenblattes wurde diese Initialisierung in der Hochsprache C umgesetzt,
besonders wichtig war
dabei die Einhaltung des zeitlichen Ablaufs der Routine. Schriften, Zahlen und
Grafiken wurden ebenfalls in C ausprogrammiert.
Für die
Kommunikation zwischen dem Notebook und dem Mikrocontroller wurde ein MAX221
verwendet. Hierfür wurde ein Programm in C# entwickelt, welches die serielle
Schnittstelle bedient und gleichzeitig das Inventar für
die Sprachverarbeitung verwaltet. Wie in Abbildung 4 zu sehen, sollte
auch grafisch angezeigt werden, welche LEDs aktiv und passiv geschaltet sind.
Eine Rücklesung der Port-Zustände bestätigte die richtige Umsetzung des ausgeführten
Sprachkommandos.
Neben der Möglichkeit der Sprachsteuerung wurde auch eine Uhr implementiert, welche
mit dem
C#-Programm eingestellt werden kann und auf
dem Controller autark weiterläuft.
Eine
drahtlose Kommunikation zwischen dem Notebook und Mikrocontroller ist
grundsätzlich realisierbar und auch die LEDs durch Arme und Beine eines
Kampfroboters zu ersetzen ist durchaus denkbar.
µC-Quellcode:
|
|

Abbildung 1:

Abbildung 2: |
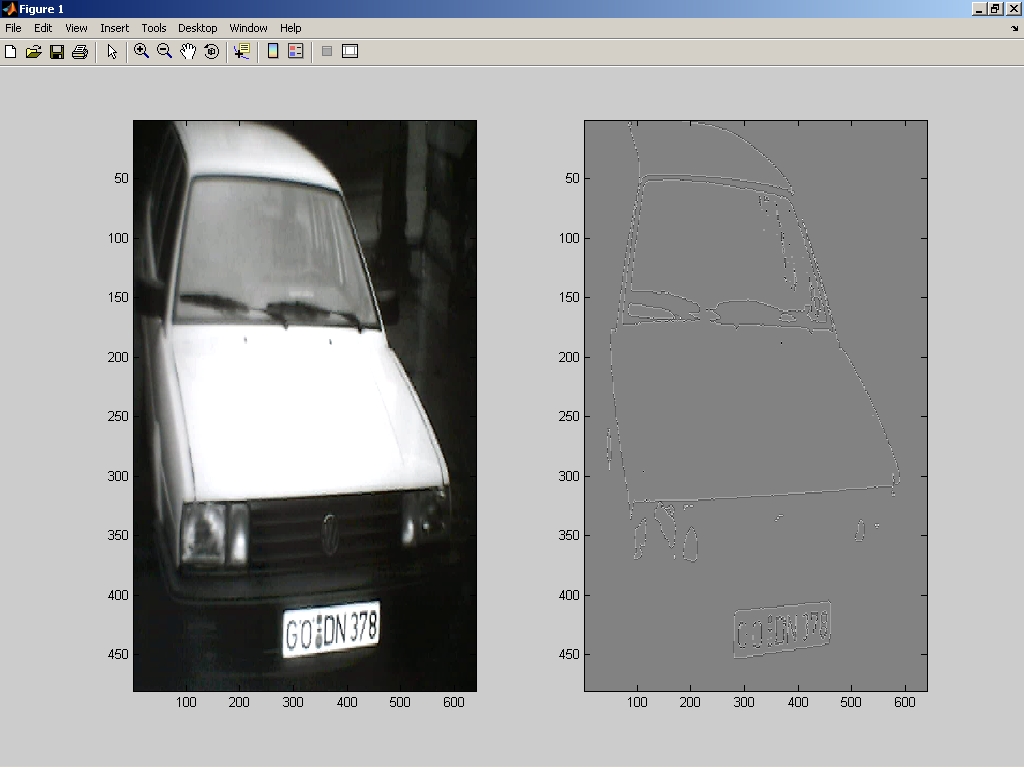
Projekt "Bilderkennung für Autokennzeichen"
Ausgehend von einer
Aufnahme eines Automobils wurde mittels einer Webkamera das Autokennzeichen
erkannt.
Um die
Bilder aus der Kamera auszuwerten, wurde die Kamera über die Twainschnittstelle angesteuert und
die Bilder auf die Festplatte gespeichert. Der Programmstart erfolgt aus Matlab
heraus, somit konnten die abgespeicherten Bilder gleich in Mattlab
weiterverarbeitet werden.
Wie in Abbildung 1 zu sehen, wurde zuerst ein
Grauwertbild aus dem Bild erzeugt und anschließend die Kanten mit einem Laplace-Operator
herausgearbeitet.
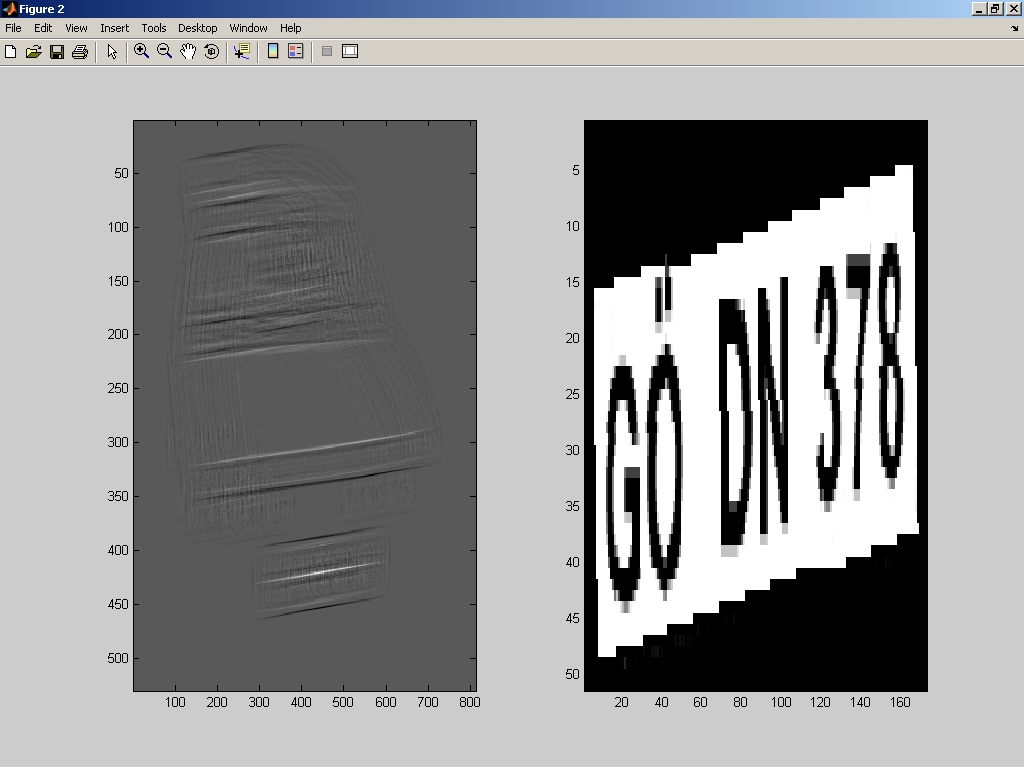
Da die Form eines Autokennzeichens einer Norm unterliegt, wurde das bis dahin
entstandene Bild mit einer Kennzeichenmaske korreliert. Weil
eine Erkennung nicht nur in einem bestimmten Punkt (Abstand zum Fahrzeug) möglich sein soll, sondern
fortlaufen (während der Fahrt), wird die Maske während der Korrelation gedreht und vergrößert. Wie
in Abbildung 2 zu sehen, ist bei einem bestimmten Winkel und einer bestimmten
Größe eine starke Korrelation im Bereich des Kennzeichens zu sehen.
Für eine endgültige Auswertung
wird nach einem kompletten Durchgang der höchste Korrelationswert
gespeichert und ein geeigneter Bereich um diesen Punkt ausgeschnitten. Nach einer
Korrelation einzelner Buchstaben und einer Datenbank im Hintergrund könnte
zusätzlich auch der Ort der Zulassung bestimmt werden.
Matlab-Quellcode:
|